Colin
Noah
Médo
Enola
EPI SCIENCES
Etape 1
Problématique n°1
Où positionner notre capteur de couleur pour optimiser le suivi d'une ligne ?
A) Hypothèse 1: on pense que le capteur couleur serais mieux placé devant a gauche du robot a cause de la montagne.
Hypothèse 2: on pense également que le capteur couleur pourrais être bien derrière.

B) Essais :
N°1 : capteur de couleur placé derrière/échec :
N°2 : capteur de couleur placé devant a gauche/réussite :
C) Conclusion : emplacement pour le capteur couleur devant a gauche du robot car il y a la falaise/vide a gauche :

Étape 2
Problématique n°2
comment rendre notre futur robot le plus maniable et stable possible ?
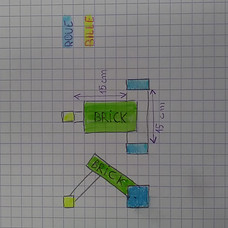
A) Hypothèse : On pense que le robot serai bien si : les roue sont écartées de 15cm; qu'il y a 15cm entre le milieu des deux roues et la bille au milieu et la bricks un peu incurvée vers le ciel.
essai n°1 : Pour ce premier essai le robot a les roues écartées de 13cm ; 9cm entre le milieu des deux roues et la bille puis la bricks et penchées vers le haut.
*Non concluant
B) Essais :

essai n°2 : Pour ce deuxième essai le robot a les même caractéristique que l'essai n°1 sauf que la Bricks est plus haute pur la stabilité.
*Non concluant

essai n°3 : Pour notre troisième essais, on voit que le robot va être assez maniable et stable :
Il a un écartement de 17cm entre ses deux roues;
Il a 14,5cm entre le centre des deux roues et la bille au milieu;
Et la brique est assez basse.
*Concluant
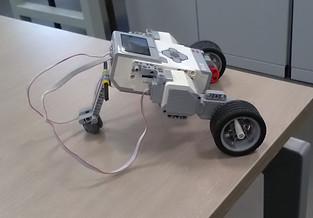
essai n°4 : Pour ce dernier essai les roues sont écartées de 23cm; entre la bille et le milieu des deux roues il y a 12cm et la Bricks est très basse.
*Concluant

C) Conclusion : A la fin de cette 2ème étapes on en a conclue que le robot le plus stable et maniable est notre essai n°4.
Étape 3
Réalisation du prototype du châssis
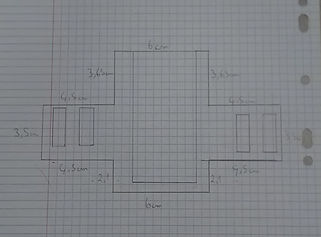
Contraintes :
Triangles : 23cm a la base et 16.6 cm sur les deux cotés
Brique : 8.4 cm de longueur et 3.95cm de largeur
Capteur couleur :
Ultrason :
3e Moteur :
Contact :
Démarches :
Pour commencer la conception de notre châssis nous avons fait un plan sur papier pour identifier la forme du châssis et ses mesures :
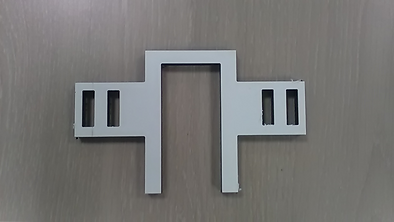
Ensuite grâce au mesures prise au dessus nous avons réaliser un prototype sur altuglass :
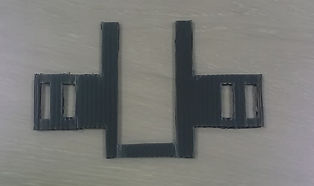

En même temps nous avons réaliser, sur le site OneShape, une réalisation en volume de notre châssis pour ensuite le mettre dans Solidworks.

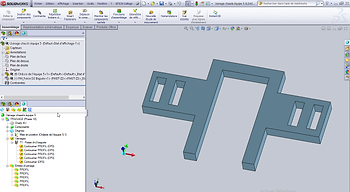

Pour finir nous avons découper un carré de PVC-expansé avec une scie circulaire qui ira ensuite à la fraise qui découpera dans ce carré notre châssis grâce au modèle SolidWorks

Notre premier châssis à été mal dimensionné. Les roues et la Brick ne s'emboitaient pas correctement alors nous avons refais les cotations; et pour la séance nous avons quand même essayer d'ajuster avec des vis le premier châssis :

Résultat :
Après notre premier châssis mal réaliser, nous sommes arriver à notre résultat final :